Det är uppenbart, att RC-stegets egenskaper hängersamman med valet av vilopunkt för röret. På detta problem kan läggasmånga synpunkter, men vi skall här endast beröra några förvilopunktsvalet väsentliga frågor.
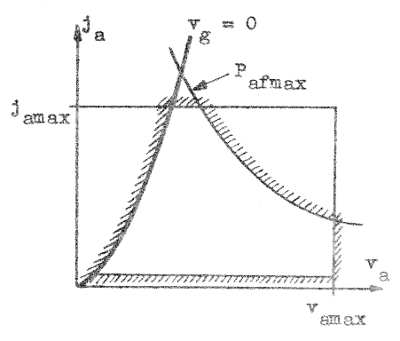
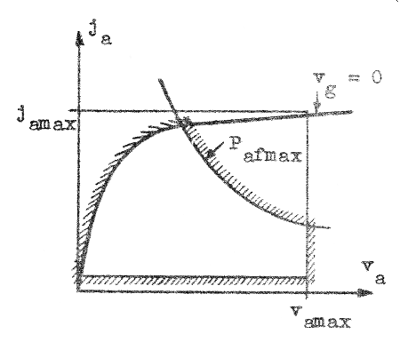
I första hand bör påpekas att vilopunkten ej kan förläggas till en godtycklig punkt i anoddiagrammet,utan den måste förläggas till det inramade området i fig. F2.23 (triodfallet) eller F2.24 (pentodfallet). Vi får nämligen ej överskridamaximalt tillåten anodförlust Pafmax, maximalt tillåten anodström jamax eller maximalt tillåten anodspänning vamax. Eftersom vi förutsatt drift i klass A1 begränsas vi även av gallerspänningskurvan vg=0. Slutligen bör vi ej arbeta inom det nedre starkt olinjära området av diagrammet.
 |
 |
|
| Fig. F2.23. Område, inom vilket vilopunkten kan förläggas (triod). | Fig. F2.24. Område, inom vilket vilopunkten kan förläggas (pentod). |
 |
|
På ett praktiskt steg måste vilopunkten normalt väljas någonstans i det inramade områdets centrala del, eftersom arbetspunkten (ja;va) i drift skall kunna pendla kring vilopunkten, utan att komma utanför det inramade området. |
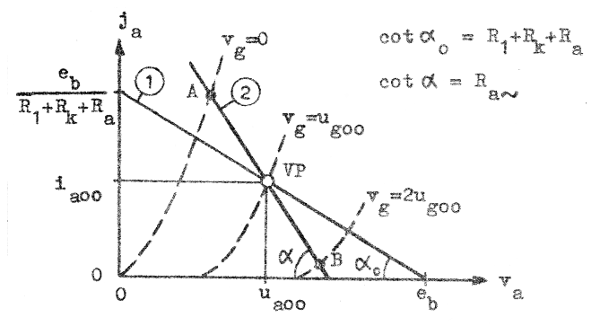
| Fig. F2.25 Resistanslinjer i anoddiagrammet. |
I fig. F2.25 har vi dragit resistanslinjen för likström
 samt på denna markerat en vilopunkt (VP), genom vilken vi även
dragit en resistanslinje för växelström
samt på denna markerat en vilopunkt (VP), genom vilken vi även
dragit en resistanslinje för växelström  . Önskar vi stor
utsignal (stor utstyrning) måste vilopunkten förläggas ungefär
mitt på växelresistanslinjen (mitt på ur
gallerspänningssynpunkt, se fig. F2.25) för att den momentana
anodströmmen skall kunna pendla approximativt symmetriskt kring
vilovärdet utan risk för gallerström (ungefär punkten A) eller
strypning (ungefär punkten B). Vid stor utstyrning bör vi även
tillse, att arbetsförhållandena i övrigt är så linjära som
möjligt (liten distortion).
. Önskar vi stor
utsignal (stor utstyrning) måste vilopunkten förläggas ungefär
mitt på växelresistanslinjen (mitt på ur
gallerspänningssynpunkt, se fig. F2.25) för att den momentana
anodströmmen skall kunna pendla approximativt symmetriskt kring
vilovärdet utan risk för gallerström (ungefär punkten A) eller
strypning (ungefär punkten B). Vid stor utstyrning bör vi även
tillse, att arbetsförhållandena i övrigt är så linjära som
möjligt (liten distortion).Enligt sambandet F2.6 är
 |
 ,
varför uttrycket för
,
varför uttrycket för  även kan skrivas
även kan skrivas |
Det kan anmärkas, att vi ovan diskuterat relativt stora signaler, medan vi i tidigare avsnitt beräknat småsignalförstärkningen hos steget. På grund av svårigheten att göra exempelvis grafiska konsturktioner i rördiagrammen, då anodbelastningen ej är resitiv (låga och höga frekvenser), låter man ofta den beräknade småsignalförstärkningen vara ett approximativt uttryck för förstärkningen även vid stora signaler. Ett dylikt förfarande kan försvaras under en förutsättning: steget måste även vid stora signaler arbeta i klass A1. Vid stora signaler fär vi alltid mer eller mindre distorsion. Om denna ger småsignalberäkningarna ingen upplysning, men däremot ger de en hygglig uppfattning om stegets förstärkning och fasvridning även vid stora signaler.
link >