Inf—randet av motkoppling i ett system medf—r alltid viss risk f—ra instabilitet, d.v.s. sjðlvsvðning. Om en f—rstðrkare har frekvensoberoende egenskaper betyder motkoppling vid en frekvens ocksÍ motkoppling vid alla andra frekvenser. Alla praktiska f—rstðrkare har emellertid frekvensberoende egenskaper, vilket g—r motkopplingsproblemet mera invecklat.
LÍt oss genomf—ra ett tankeexperiment med systemet engligt fig. F3.21 dðr sÍvðl F som
| |
 |
|
| |
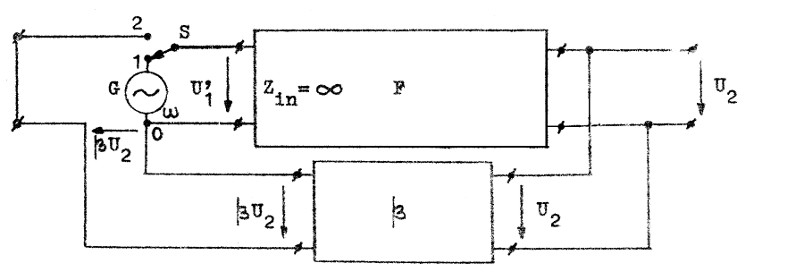
Fig. F3.21. Schema, anvðnt f—r
stabilitetsunders—kning. |
|
F—rstðrkaren antages matad av sinusgeneratorn G , som ger spðnningen U'1. Utsignalen frÍn f—rstðrkaren blir
 |
Antag nu att generatorfrekvensen w varieras frÍn noll till oðndligheten och att utspðnningen frÍn Íterkopplingsfyrpolen (
 |
Om och nðr detta intrðffar, f—res omkopplaren S hastigt —ver frÍn lðge 1 till lðge 2. Hðrigenom ðndras ingenting i systemet och vi kan dðrf—r vðnta oss, att systemet fortsðtter att arbeta, trots att signalkðllan G bortkopplats. Systemet kan vðntas sjðlvsvðnga.
Enligt vÍrt resonemang fordras f—r sjðlvsvðngning att vid nÍgon frekvens villkoret
 |
Eftersom
 |
F3.35 |
Villkoret F3.35 kan vi ðven uttrycka med det s.k. amplitudbalansvillkoret och fasbalansvillkoret:
 |
F3.36 |
dðr n = 0, 1, 2, 3........
Om man vid experiment ovan vid nÍgon frekvens funnit, att amplituden pÍ spðnningen mellan 2 och 0 dðrvid haft samma faslðge som xx och att spðnningen mellan 2 och 0 dðrvid haft samma faslðge som U'1, visar ett liknande resonemang, att man fÍr sjðlvsvðngning med vðxande amplitud vid omkopplarens omlðggning frÍn lðge 1 till lðge 2 (se hðrtill avsnitt H1.01).
Villkoret f—r sjðlvsvðngning kan dðrf—r formuleras pÍ f—ljande sðtt
 |
F3.37 |
som benðmnes Barkhausens sjðvsvðngningskriterium.
I belysning av vÍrt svðngningskriterium kan vi sðga, att sjðlvsvðngningen uppkommer pÍ grund av att Íterkopplingen vid en viss frekvens blir positiv och vid samma frekvens har stor styrka.
VÍr motkopplade f—rstðrkare fÍr emellertid ej sjðlvsvðnga. Villkoret hðrf—r blir:
 |
F3.38 |
dðr n = 0, 1, 2, 3........
Med denna formulering benðmnes sambandet F3.38 Barkhausens stabilitetskriterium, som ðr ett tillrðckligt men i vissa fall ej n—dvðndigt villkor f—r stabilitet i en Íterkopplad f—rstðrkare.
Om vi i komplexa talplanet ritar den kurva, som komplexa slingf—rstðrkningsvisarens spets beskriver, dÍ
Antag att detta diagram f—r fem olika motkopplade f—rstðrkare har utseendet enligt kurva
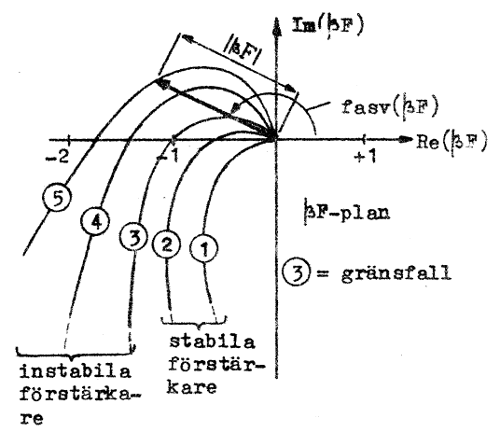 |
enligt kriteriet F3.38
stabila f—rstðrkare. F—r kurva Barkhausens stabilitetskriterium innebðr alltsÍ, att slingf—rstðrkningens Nyquist-diagram ej fÍr skðra negativa realaxeln i eller till vðnster om punkten -1+j0. |
|
| Fig. F3.22. Komplexa slingf—rstðrkningens
Nyquist-diagram f—r fem olika motkoppklade
f—rstðrkare. |
Det kan nu vara lðmpligt att diskutera ett praktiskt exempel. En typisk 3-stegs RC-kopplad f—rstðrkare med identiskt lika steg antages ha ett signalschema enligt fig. F3.23. F—rstðrkaren motkopplas enligt figuren och vi frÍgar oss, vilket ðr det st—rsta vðrde pÍ resistansen R, som kan tillÍtas, utan risk f—r sjðlvsvðngning?
F—r f—rstðrkaren antages f—ljande data gðlla:
 |
Vi inf—r
 |
R utg—r, som framgÍr av figuren, en del av resistansen Rg.
| |
 |
|
| |
Fig. F3.23. 3-stegs RC-kopplad f—rstðrkare. |
|
Med figurens riktningsbeteckningar blir
 |
F3.39 |
Den motkopplade f—rstðrkarens komplexa f—rstðrkning blir enligt sambandet F3.3
 |
F3.40 |
dðr
Vid medelh—g frekvens ðr
 |
F3.41 |
dðr
Vid lÍg frekvens gðller f—r ett steg
 |
F3.42 |
dðr
 det enskilda stegets undre
grðnsfrekvens (se ekv. F2.13).
det enskilda stegets undre
grðnsfrekvens (se ekv. F2.13).Vid h—g frekvens gðller f—r ett steg
 |
F3.43 |
dðr
 det enskilda stegets —vre
grðnsfrekvens (se ekv. F2.15).
det enskilda stegets —vre
grðnsfrekvens (se ekv. F2.15).Komplexa slingf—rstðrkningen vid lÍg frekvens erhÍlles ur sambanden F3.39 och F3.42:
 |
F3.44 |
 |
F3.45 |
Vid en viss lÍg frekvens f1 blir
 |
|
 |
F3.46 |
Komplexa slingf—rstðrkningen vi h—g frekvens erhÍlles ur sambanden F3.39 och F3.43:
 |
F3.47 |
 |
F3.48 |
Vid en viss h—g frekvens f2 blir
 |
|
 |
F3.49 |
Enligt ovan finns det alltsÍ tvÍ frekvenser
 |
|
 |
AlltsÍ skall
 |
|
 |
F3.50 |
R mÍste alltsÍ vðljas mindre ðn 44 ohm, om den motkopplade f—rstðrkaren skall vara stabil.
Med det berðknade kritiska vðrdet pÍ
 |
Slingf—rstðrkningen mÍste sÍlunda vid medelh—g frekvens understiga vðrdet 8, ty i annat fall blir
I fig. F3.24 nedan har Nyquist-diagrammet f—r komplexa slingf—rstðrkningen
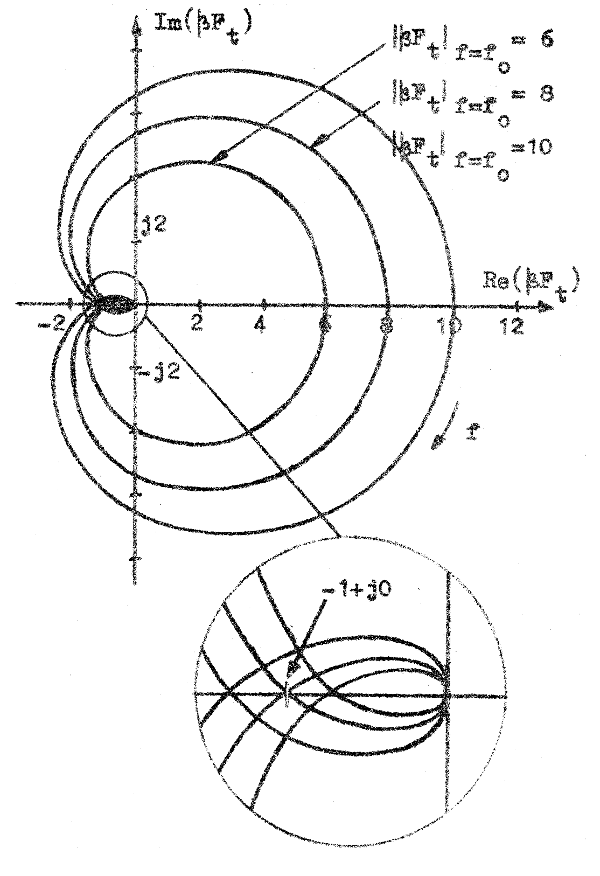 |
Jðmf—r vi med diskussionen
pÍ sid. F3.20 innebðr de bÍda sistnðmnda
vðrdena, att f—rstðrkaren ðr instabil, medan
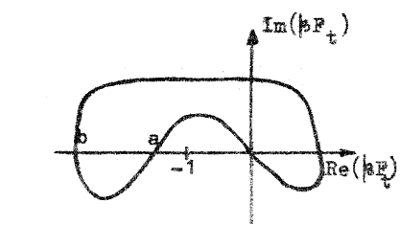
vðrdet 6 innebðr en stabil f—rstðrkare. Det kan tðnkas intrðffa, att slingf—rstðrkningens Nyquist diagram f—r en viss f—rstðrkare fÍr det i fig. F3.25 skisserade utseendet. Mellan punkterna a och b pÍ negativa realaxeln ðr Observera i detta sammanhang pÍpekandet pÍ sid. F3.19, att Barkhausenvillkoret F3.38 ðr ett tillrðckligt men ej n—dvðndigt villkor f—r stabilitet. |
|
| Fig. F3.24. Komplexa slingf—rstðrkningens
Nyquist-diagram i en 3-stegs RC-kopplad
f—rstðrkare. |
Enligt Nyquist ðr en f—rstðrkare stabil, om slingf—rstðrkningskurvan i Nyquist-diagrammet ej innesluter punkten -1+j0. Detta nðmnt som en orientering.
 |
Ett nðrmare studium av hith—rande frÍgor sker
inom reglertekniken. I detta sammanhang b—r nðmnas, att information angÍende en f—rstðrares stabilitet ðven kan erhÍllas genom studiumav slingf—rstðrkningens Bode-diagram. Studerar vi alljðmt vÍr 3-stegsf—rstðrkare, sÍ har vi enligt sambandet F3.47 vid h—g frekvens: |
|
| Fig. F3.25. Exempel pÍ Nyquist-diagram f—r en
villkorligt stabil f—rstðrkare. |
 |
F3.51 |
Vi uttrycker slingf—rstðrkningen
 |
F3.52 |
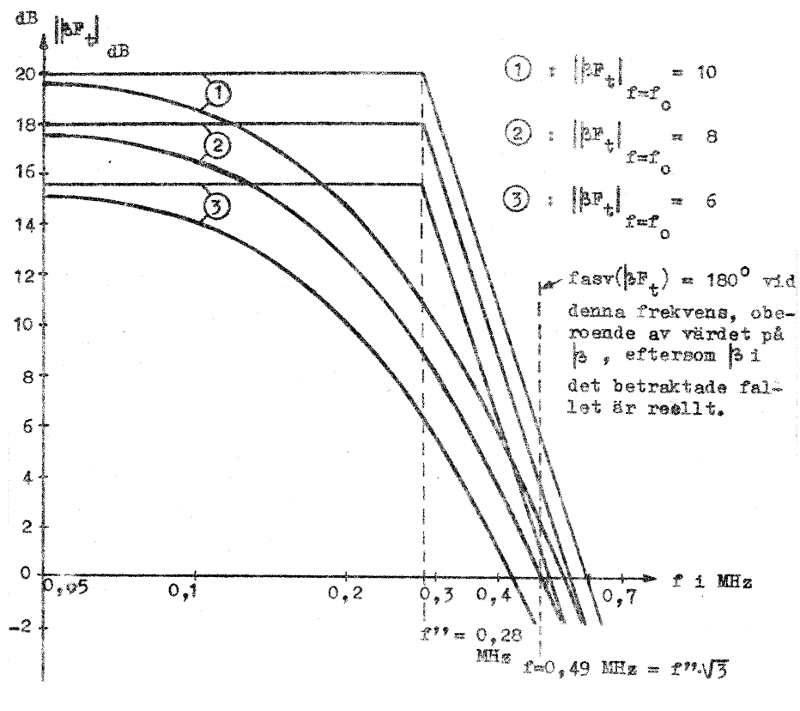
dðr f'' = 0,28 MHz enligt tidigare berðkning.
I fig. F3.26 nedan har med ledning av sambandet F3.52 slingf—rstðrkningens asymptotiska och verkliga beloppkurva ritats f—r nÍgra olika vðrden pÍ slingf—rstðrkningen vid medelh—g frekvens (nÍgra olika vðrden pÍ
Vidare har i diagrammet den frekvens, vid vilken
| |
 |
|
| |
Fig. F3.26. Slingf—rstðkningen vid h—g frekvens,
presenterad i ett Bode-diagram, dðr sÍvðl
asymptotiska som verkliga beloppkurvor utritats. |
|
Studerar vi diagrammets verkliga beloppkurvor finner vi f—r kurva
Kurva
Hade vi bed—mt f—rstðrkaren enbart med ledning av de asymptotiska kurvorna, hade vi eventuellt befarat instabilitet i samtliga tre fall, eftersom all asymptotkurvorna har ett dB-tal, som ðr st—rre ðn noll vid f = 0,49 MHz. Hade vi Í andra sidan dimensionerat f—rstðrkaren sÍ att de asymptotiska beloppkurvorna passerat under 0-dB-punkten vid f = 0,49 MHz, sÍ hade f—rstðrkaren med god marginal varit stabil.
Ett resonemang av den typ vi ovan f—rt kan givetvis genomf—ras ðven vid lÍg frekvens.
Kurvorna i fig. F3.26 ger oss en tankestðllare: om kurvorna i trakten av transmissionsomrÍdets grðns fallit snabbare (brantare) med frekvensen, sÍ skulle nivÍn vid medelh—g frekvens kunnat h—jas (motkopplingsgraden —kas) utan risk f—r sjðlvsvðngning
Det vore sÍlunda f—rdelaktigt om de kretsar, som utg—r kopplingen mellan stegen i vÍr 3-stegsf—rstðrkare, eller om Íterkopplingsfyrpolen kunde utformas sÍ, att amplituden
link >